


Один муравей не очень умен, но если собрать их вместе, они смогут добиться замечательных результатов. Вдохновленные этим возникающим кооперативным поведением, исследователи из Гарварда создали роботов, которые могут работать вместе, чтобы сбежать из «тюрьмы», не нуждаясь в конкретном плане.
В некотором смысле, муравьиная колония работает по алгоритму: отдельные муравьи не думают конкретно о задаче, но они следуют набору инстинктивных правил, которые направляют их к сложным инженерным подвигам, таким как рытье сетей туннелей или строительство мостов. Они общаются друг с другом с помощью антенн (усиков) и феромонных следов.
Команда Гарварда начала с проведения эксперимента с небольшой группой муравьев, помещенных в загон, круглую ловушку, окруженную мягкой песчаной стеной, чтобы увидеть, как они работают вместе, чтобы убежать. Сначала, все муравьи бродили хаотично, но вскоре некоторые из них начали копаться в стенах в разбросанных местах. Со временем, команда обнаружила, что муравьи перестали копать в одиночку и вместо этого стали собираться вместе, чтобы более эффективно работать в одном туннеле, пока им в конце концов не удалось вырваться наружу.
На основе своих наблюдений, исследователи построили математические модели происходящего. Когда муравьи сталкивались друг с другом, они общались через свои антенны. Со временем, они начали отдавать предпочтение областям, где они взаимодействовали чаще, создавая петлю обратной связи, в которой они собирались в этих местах все больше и больше. Это заставило их сосредоточить свои усилия на копании в одном месте, пока они не прорвутся, вместо того, чтобы каждый муравей копал свои собственные туннели.
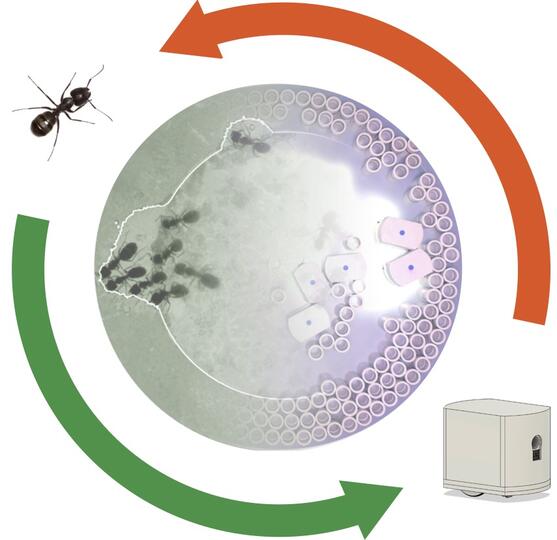
Исследователи изучили настоящих муравьев и разработали параметры и модель, чтобы понять задачу раскапывания стен муравьями. Руководствуясь этим пониманием и опираясь на модели, исследователи создали роботов-муравьев по прозвищу RAnts. Фото: Mahadevan Lab/Harvard SEAS.
Имея эту модель, команда приступила к созданию роботов, которые следовали схожим правилам. Их роботизированные муравьи, которых они назвали RAnt, не выделяли химических феромонов, а оставляли после себя световые поля, или «фоторомоны», которые становились ярче, чем больше раз мимо проходили роботы.
RAnts были запрограммированы следовать трем простым правилам: они должны были следовать за градиентом фоторомонного поля, избегать других роботов в местах с высокой плотностью поля и подбирать препятствия в местах с высокой плотностью и перемещать их в области с низкой плотностью.
И, конечно же, эти правила позволяли RAnt сотрудничать почти так же, как в эксперименте с муравьями. Помещенные в собственный загон, окруженные несколькими кольцами небольших препятствий, роботы вскоре поняли, что лучший план побега — работать вместе, сосредоточившись в одном месте.
Этот метод может быть жизненно важен для создания роев простых роботов, которые могут выполнять сложные задачи, работая вместе, и существует множество других примеров роботов, вдохновленных муравьями. Команда говорит, что это потенциально может быть увеличено до десятков или сотен роботов для различных вариантов использования, с дополнительным бонусом, что даже если несколько роботов выйдут из строя, команда в целом все равно сможет выполнить свою работу.
«Мы показали, как совместное выполнение задач может возникнуть из простых правил, и аналогичные такие поведенческие правила могут применяться для решения других сложных задач, таких как строительство, поисково-спасательные работы и оборона», — сказал С. Ганга Прасат, соведущий автор исследования.
Исследование было опубликовано в журнале eLife. Муравьев и роботов можно увидеть в действии на видео ниже.
Физический интеллект коллективов муравьев и роботов. Видео: Harvard John A. Paulson School of Engineering and Applied Sciences.
Источник: Harvard.







